
Felipe Fakir
Systems Engineer
Real-time simulation for control loop design and operators training systems (OTS) are increasingly being used in the process industry due to some advantages as safety, repeatability, comprehensiveness, and reduced cost and time of development. One technique to perform real-time simulations is HIL – Hardware-In-the-Loop, which consists in the simulation of an industrial process part operating in real-time with real equipment belonging to the control system.
HIL addresses the use of a dedicated hardware for real-time model simulation and communication interface with control systems. This whitepaper highlights the use and discusses the benefits of the HIL technique for industrial process control. The process dynamic model, a coupled tank industrial process, was designed in the Mimic simulation software and downloaded in to a real-time hardware, VIM [Virtual IO Module], for process simulation purpose.
This process model is integrated to the DeltaV distributed control system (DCS), designed to perform process control. By using the HIL solution, it is possible to enable OTS of industrial control systems, besides simulating the behavior of industrial processes with different controller tuning, reducing risks, tuning and startup times of automation systems.
The authors open noting benefits simulation for automation system suppliers:
…such as reducing costs with prototyping, possibility to testing systems under different conditions with high repeatability; and as a result optimizing processes and product development…
They highlight the three most known simulation techniques—the first two considered real-time simulations:
…Rapid Control Prototyping (RCP), the Hardware-In-the-Loop (HIL) and the Software-In-the-Loop (SIL)…
The authors describe the advantages of each approach:
The advantages of RCP over a controller prototype are that developing the controller in a real-time simulator is faster and more flexible. Considering the HIL technique, usually a physical controller is connected to a virtual plant executed on a real-time simulator. The main advantages of HIL is allowing test of controllers in conditions unavailable on real plants. SIL usually does not require real-time and deterministic responses as both controller and plant can be simulated on the same simulator. The main advantage of SIL over RCP and HIL is that no I/O or hardware needs to be used.
They provide an illustration of a real-time simulation system in a Hardware-in-the-Loop configuration:
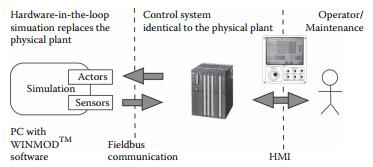
This configuration:
…has become indispensable for the aerospace, automotive, marine and defense industries and is justified by its many advantages, including cost effectiveness, rapid prototyping, repeatability, safety, comprehensiveness, automated testing, etc.
The authors propose a HIL architecture for the DeltaV system:
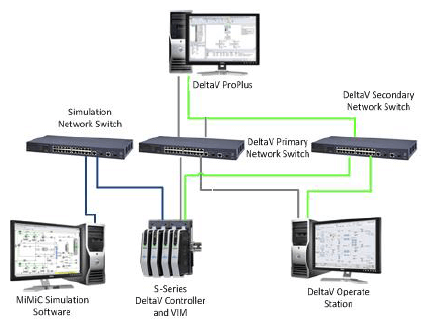
Read the whitepaper for more on how they build the process model and method for modeling, characterizing, and developing control strategies for the simulation.
They conclude:
The use of HIL simulations in design of control systems and operator training environment is effective since the designer knows well the behavior or the dynamics of the process to be controlled. The HIL architecture, as the one proposed in this paper, allows several studies to be conducted, for example the design and implementation of new control strategies. In addition, and maybe more important, is the possibility of building operator training centers fast and safely, reducing training costs and time to operate an industrial plant.
The advantage of using a real-time simulator for OTS is that the user can acquire a feeling for the controller and plant that correctly and reliably represents the real system, without the delays and limitations commonly found in training environments based on recorded scenarios.
You can connect and interact with other simulation professionals in the Plan & Design and Implement & Build groups in the Emerson Exchange 365 community.








